
五、其它
這一節主要簡介錨碇系統的設計、安裝與回收,以及錨碇系統所需之配合儀器與裝備;另外也簡介一下臺大海洋所近年在海面浮標水上、水下部份全系統儀器整合以及海上作業方面的一些進展。
(一)錨碇系統(Mooring system)設計、安裝與回收:
除了船載式表面溫鹽儀(如SBE 21 SeaCAT Thermosalinograph)、流速儀(如SbADCP)、XBT、UCTD等可以在研究船航行時同步執行海表面溫鹽分布及海流、溫鹽垂直剖面觀測(稱為走測,underway observation)、或是將船停於定點由船旁下放CTD或直讀式流速計(如前述之NBA DNC-3,LADCP)量測溫鹽、海流剖面,甚或投放漂流浮標測海流外,如果想在海上某處進行定點長期連續觀測,一般都是將許多自記式儀器連接成串(稱為錨碇系統),然後以錨碇方式佈放在海裡。錨碇系統的設計、安裝與回收是物理海洋學現場實驗工作中很重要的一環。
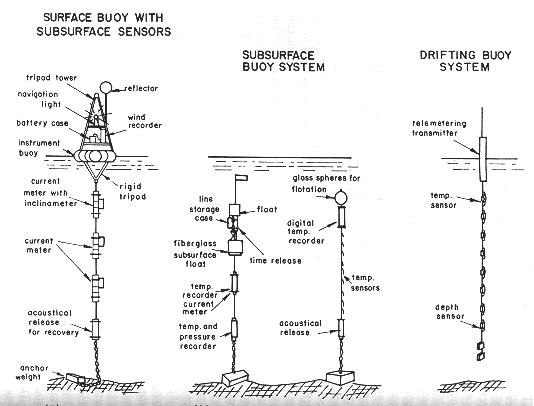
![]() 幾種常見的錨碇系統(mooring system)架構示意圖,左方為水面浮標方式(如下節所述之ATLAS
浮台),中央者為水下浮標站,右方則為漂浮懸掛方式(一般多用以量測海面混合層發展、或是量測內波、聲學實驗用等)。
幾種常見的錨碇系統(mooring system)架構示意圖,左方為水面浮標方式(如下節所述之ATLAS
浮台),中央者為水下浮標站,右方則為漂浮懸掛方式(一般多用以量測海面混合層發展、或是量測內波、聲學實驗用等)。
摘自Pickard, G. L. and Emery, W. J. (1982) "Descriptive Physical
Oceanography", 4th ed.。

「將錨碇系統放下水不難,難的在於相隔半年或一年多甚至更久之後是否還能順利收得回來,而且還要資料完整」。如何才能確保順利回收且資料完整?這就需要在系統設計、安裝與回收等步驟中步步為營,每一步都得小心謹慎容不得出一絲差錯,否則往往就會應了那句老話「所有錯誤都要付出代價的」(郭董說:「魔鬼都藏在細節裡」,確實是至理名言)。簡言之,錨碇系統設計先要規劃好幾件事,(1)要放哪兒?確定地點後就要盡最大可能去找當地的背景資料(地形、底質、流況、氣象環境等等)作為設計參考,(2)放哪些儀器?(3)放多久?(4)何時放?有了這些相關資訊在心底後,才可望談細步設計。細步設計之初最重要的無非是要依設計條件來確定系統的總浮力、海流的拖曳力(水面浮標還需要增加考慮海面風與浪的效應)、以及底碇沈塊的重量等等,等大致確定後就開始細步調整,其中浮力調配以及需設置多少備用浮力(以防有部份浮球破損後仍能回收系統,這涉及安全係數要設多少?)等最麻煩,每當浮力調整一次則底碇沈塊重量往往也需重調一次,而纜索拉力也要重算,另外如放置時間較長則更需要考慮到防蝕(例如有不同材質之金屬物件相連時該如何處理?)以及魚咬等問題(如果錨碇系統上層是處在海洋光照層內,放置久了之後錨碇系統纜索上便會有大量生物附著,會吸引魚群前來啄咬,如果是使用外包絕緣皮的鋼纜索,一旦外皮被咬破,鋼纜索會很快鏽蝕,有可能要不了多久就斷裂致使上層儀器流失)而需依深度與背景環境制宜選用不同材質的纜索、浮球等。最後總是要在各種選項與限制條件下,折衷找出一個相對比較合理的方案。
實際出海作業航前組裝錨碇系統又是另一關;除了按設計圖施工外,更重要的是組裝前與組裝後的品管檢查。在組裝前要確保每一個連接環材質都沒有問題,深水浮球無任何不正常徵兆(例如玻璃浮球上如有刮痕就最好不要再放深水環境,否則有可能會爆裂),各種儀器也要先行檢查、測試以確保無誤(尤其是O形環),還有一些感測器也要仔細查看,例如過去就曾發生過海流儀在深海中漏水事件,原因出在導電度感測器有裂痕,海水順著裂痕以及連接線路滲入儀器內部所致。錨碇系統組裝好之後更要反復檢查看組裝後各處插梢是否固定無誤?有沒有裝錯的地方等等。還有對於幾千公尺長的長錨碇系統更要考量到如何分段組裝以及分段施放的問題,這些往往都要視現場狀況(不同的船設備會不一樣,另方面船艉甲板作業空間不大,各分段擺放位置要依施放順序好好規劃)再行調整。至於下水安裝作業,到現場後第一步是先對預定點位做水深調查,除非是一定非該位置不可,否則最好是在預定點附近選一塊地形比較平坦的地點作為施放點。施放下水後,在船上可立即使用聲學詢答器(acoustic commander)發令詢問位於錨碇系統底端之音響釋放儀,詢答器會根據後者回訊之時間差計算出相對距離,儀器下沈途中與研究船的相對距離會逐漸增大(一般錨碇系統下沈速度約為每分鐘90公尺,等到距離不再穩定增加便是到底了),待錨碇系統安全坐底後再用聲學詢答器訊問距離並以三角定位法為錨碇系統定出確實位置,待一切妥善後方可離開(以前亦曾發生過錨碇系統下水後不久即因纜索出狀況斷裂而自行上浮的例子)。
回收作業則最好是選在天快亮之前的拂曉時間,原因是錨碇系統設計通常會在錨碇系統串最上端浮球旁加掛一或數具閃光燈(flasher,有水銀開關控制,當閃光燈浮出海面後才會閃光)以及無線電信標(radio beacon,也是在浮出海面後才會工作),當錨碇系統串上浮時閃光燈等最先浮出海面,在一片漆黑的海上一點點閃光就會非常醒目,可以幫助當值航海員減少搜尋時間;但是如果很不幸閃光燈失效那麼馬上就天亮了就可以用目視搜尋。回收作業一般程序是(1)到點位後研究船停俥先以聲學詢答器喚醒音響釋放儀(錨碇系統下放後音響釋放儀除收聽電路外其餘部份會自動休眠以節省電力消耗),(2)叫醒音響釋放儀後接著便詢問其距離,將船移到最接近處,(3)再以聲學詢答器發令通知音響釋放儀解開連接裝置,使錨碇系統與沈底重錘脫離,(4)等音響釋放儀發出「已脫勾」訊號後,繼續改為不斷詢問音響釋放儀距離,藉以判斷是否順利上浮以及船與錨碇系統之相對距離,如在強海流區(如黑潮流域)受海流影響距離越拉越遠時則需調整船位移近,(5)上浮過程中船上需加強瞭望,如未見閃光燈閃光信號,若錨碇系統裝有無線電信標,則瞭望人員亦可用手持無線電定向天線搜索信標方位,若無則可仍用聲學詢答器詢問音響釋放儀距離,再以三角定位法為錨碇系統定位後尋找,如果錨碇系統串裝有雷達反射器亦可藉助雷達協助搜尋。萬一以上各法處理均失效,錨碇系統仍然查無影蹤,則等天亮後輔以目視並擴大搜尋範圍。
儀器回收上船後第一步當然是用淡水沖洗,晾乾後先不忙拆卸取出資料記錄媒體,要先觀察試提儀器看重量是否異常?如果過重表示儀器進水了,這時千萬不可輕率拆卸(如果進了水,儀器內部有可能處於非常高壓狀態,例如假使儀器原先是放在4000m深處,進水後內部空氣壓力可達400個大氣壓),要使用特殊夾具將儀器夾好後才能拆卸固定螺絲,否則有可能會引起內部高壓空氣爆炸式地突然洩出,並且夾帶噴出電池腐蝕後的有毒性液體。這種進水事件雖然發生率很低,但過去確實發生過,因此要特別引以為戒。
(二)配合深海錨碇之儀器與裝備﹕
一組完整的錨碇系統除了觀測儀器外,尚包括纜索、連接環扣、沈底重錘或錨碇塊、浮球(或浮筒、浮台等)、以及音響釋放儀(或是定時式釋放儀)、無線電信標、閃光燈、雷達反射器等輔助裝備。以下為音響釋放儀、深水浮球、無線電信標 以及閃光燈之簡介。
(1)音響釋放儀(Acoustic release),是一種用聲學訊號遙控的機械裝置,根據聲學詢答器所發命令而作動,通常只有三個動作:(1)被喚醒,收到聲學詢答器的指令後將所有電路開啟,做好暖機準備;(2)回復應答訊號(聲學詢答器收到回訊後根據發令與接收之時間差便可求出二者相對距離),(3)接到特定指令後便啟動馬達(也有燒熔式的,會將卡筍燒斷)解開連接環。(音響釋放儀生產廠商甚多,不同用途之型號亦多,以下僅以Teledyne Benthos之SR-9100為例)
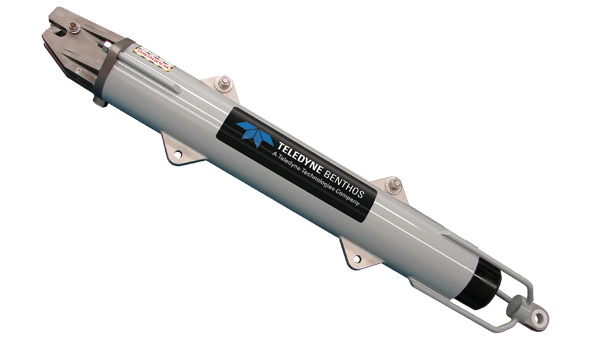 Teledyne Benthos SR-9100 Acoustic Release (摘自 Teledyne Benthos網頁) |
Teledyne Benthos SR-9100
Specification: DEPTH 6,700 meters WEIGHT In Air: 47.7 kg In Water: 37.7 kg DIMENSIONS 12.7 cm diameter x 116.8 cm length FREQUENCY RANGE Low frequency (LF) 9-14 kHz BAUD RATE 140-15,360 bps BIT ERROR RATE Better than 10-7 with high SNR TRANSDUCER Omni-directional* *SR-9100R remote transducer head option available for deep water challenging environments. Remote model comes with a low frequency directional transducer head that can be located up to 2 meters from the SR9100 housing. Transducer has a 40 degree beam. RELEASE LOAD 5000 kg (11,023 lbs) ACOUSTIC RELEASE MECHANISM High torque motor. |

![]() 工作人員正在海研一號後甲板上連接深海用音響釋放儀,
工作人員正在海研一號後甲板上連接深海用音響釋放儀,
Benthos此型釋放儀(865-A)之作業深度(耐壓度)可達12,000m。
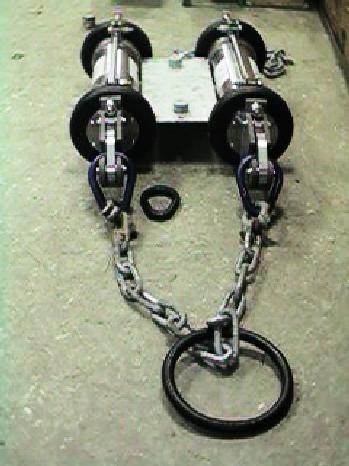
(2)玻璃浮球:用於深水,提供錨碇系統浮力(以Teledyne Benthos產品為例)。
 |
玻璃的耐壓性最好,因此深水(超過1000m後)環境多使用玻璃浮球(如使用鋼浮球,深度過深鋼板就需加厚否則耐壓強度不夠會被壓垮,但加厚就會變重,而使淨浮力變小,在太深環境下鋼浮球之重量甚至會大於浮力,因此不合用)。左圖為玻璃浮球移除外殼後照片。玻璃浮球為兩個玻璃半球上下相疊所組成(接合處置有墊片迫緊),置入真空櫃抽真空後因氣壓作用二半球即接合為一不會脫開,黑色膠帶為接合前固定以及接合後防水汽滲入用。 外徑33cm(左)與43.2cm(右)的玻璃浮球,分別可提供10.4 kg以示25.4
kg的淨浮力,耐壓深度則為9000m (33cm浮球)以及6700m (43.2cm浮球)。 |
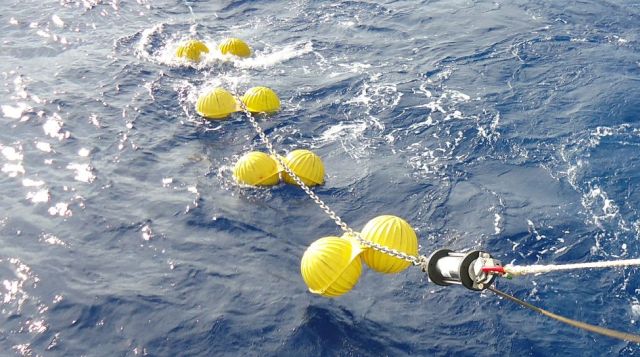
長錨碇串上的玻璃浮球(已裝了黃色保護外殼),尾端圓筒型裝置為音響釋放儀。(海研一號,2016年6月)
(3)無線電信標(Radio Beacon),浮出海面後會發出特定頻率的無線電信號以方便搜尋(以下以MetOcean之NovaTech產品為例)。
|
|
無線電信標(Radio beacons,左一至右二)以及無線電定向天線(右一)(摘自MetOcean telematics網頁) |
(4)閃光燈(Flasher),浮出海面後夜間會發出閃光以方便搜尋(以MetOcean之NovaTech產品為例)。
 |
閃光燈(flasher)(摘自MetOcean telematics網頁) |
(三)水面浮標系統:施放淺海錨碇系統(不論水面浮標站或是水下浮標站)除了需考量自然力量(風、浪與流)外,更麻煩的是人為造成的破壞(未必是有意的),例如漁民海上作業需視適當潮時下網,有些人在海上等潮時會把船筏拴在水面浮標上然後停俥等待適當潮水(省油啊),拴一艘也就罷了,有時還「呷好逗相報」的一艘拴一艘,一連串好幾艘都拴在水面浮標上,試問這麼多船產生的拖曳力又豈是小小的水面浮標系統所能承受的(設計時只考量自然力量,誰又會那麼天才能預知還有這種問題)?流大時輕則斷纜流錨浮標漂離,重則連浮標主體都被拉壞。不過不管怎麼說,淺水錨碇系統由於距岸近,只要有適當的工作船,不論收、放以及維護、保養都相對方便且容易許多,特別是水淺故水下繫纜不長,如果怕這怕那,還可以把水面浮標製作得很「粗勇」,水下繫纜則全改用粗錨鍊,這樣就比較能承受小船筏的「騷擾」。然而這種作法成本甚高並不適合用於深海環境,特別是一般科學研究往往經費都頗拮据,錢得摳著用,低成本且又堅固耐用的系統才是研究人員的最愛,ATLAS (Autonomous Temperature Line Acquisition System)錨碇系統(如下圖)便是一種合用的深海水面浮標系統。不過,ATLAS深海水面浮標也未必不會受到人為破壞,臺大海洋研究所過去在南海中部布放的ATLAS水面浮標便曾徹底被破壞過,由於ATLAS浮標水上裝置會透過衛星每天定時回報所在位置經緯度,有一天中控站突然發現浮標正穩定快速地向西移動,接著進了越南峴港並且上了岸再往北移,最後停在陸地上。後來海研一號回收時,發現ATLAS圓環型浮台水面以上部份全都不見了,幸好水下部份係獨立運作,水下部份的資料記錄並沒受到影響。
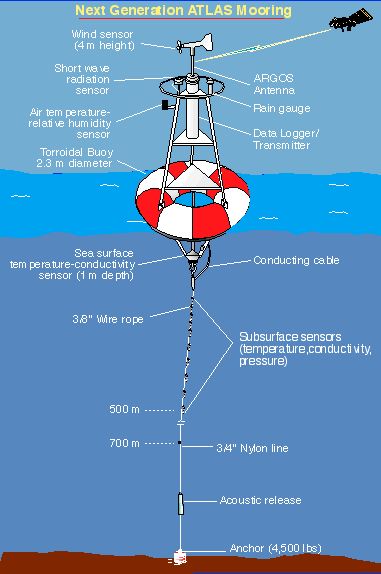 |
ATLAS錨碇系統是由美國NOAA下屬「太平洋海洋環境實驗室」(Pacific Marine Environmental Laboratory, PMEL)的工程師們在1984年設計開發出的,隨後多國合作的「熱帶大氣與海洋」(Tropical Atmosphere Ocean,TAO)計畫,由1984年底至2001年共十餘年間,所布放的觀測陣列(稱為TAO array)中總共使用了超過500具的ATLAS錨碇系統;經多年現場考驗証明ATLAS錨碇系統在惡劣海況下仍能存活且可靠度高、成本也低。1990年代中期PMEL又將ATLAS系統做了一些改善,例如增加感測器數量、改善資料品質、將內存記錄器容量加大並縮短觀測時間間距、強化系統的可靠度以延長系統使用壽命、簡化製作過程以及降低成本等(引自NOAA PMEL Global Tropical Moored Buoy Array網頁)。 臺灣大學海洋研究所係於1993年從PMEL引自ATLAS錨碇系統,由唐存勇教授團隊負責建立相關的施放、回收以及維護技術,海研一號並於1994年底赴赤道海域參與TAO array的佈放與回收作業;隨後在1998年南海季風實驗(South China Sea Monsoon EXperiment)計畫期間也在沿南海海盆之東北-西南軸線的北、中、南三處放置了三座ATLAS錨碇系統,進行海面邊界層內氣象參數以及海面下各層海溫剖面長期觀測(下列四圖均為當時所拍的歷史照片)。2009年3月,為研究颱風與海洋間交互作用,臺大海洋所執行「西北太平洋及其邊緣海之颱風-海洋交互作用與內波之研究」計畫(簡稱ITOP),又在西北太平洋中施放了三組ATLAS錨碇系統,成功維持了一年多的連續觀測作業。經過多年來不斷地作業磨練後,臺大海洋所建立了完整的作業技術,同時所佈放的ATLAS系統均能安然歷經過多次颱風事件的考驗,証明載台本身堅固性以及錨碇設計均能通過在極惡劣海況下仍可存活的要求,但系統電路部份因過於老舊性能業已不敷新時代使用亟待更新。 |

![]() 1998年海研一號在南海佈放ATLAS海上浮台觀測氣象參數。
1998年海研一號在南海佈放ATLAS海上浮台觀測氣象參數。

![]() 1998年海研一號施放ATLAS浮台作業一景。
1998年海研一號施放ATLAS浮台作業一景。

![]() 1998年
置放在南海中部的ATLAS浮台,背後為海研一號。
1998年
置放在南海中部的ATLAS浮台,背後為海研一號。

![]() 1998年
工作人員搭乘小艇爬上ATLAS浮台以筆記型電腦下載浮台氣象儀器之原始記錄情形。
1998年
工作人員搭乘小艇爬上ATLAS浮台以筆記型電腦下載浮台氣象儀器之原始記錄情形。
在2009年執行ITOP計畫時,鑑於舊有ATLAS系統電路控制單元功能已不敷使用,當時臺大海洋所即面臨是否(1)向PMEL外購更新設備,或是(2)自行發展所需系統的選擇,當時決定依本身需求先自行開發了一些電路單元以增加觀測功能,並與舊系統同步作業。ITOP計畫結束後,由於ATLAS載台在歷經了多次颱風巨浪考驗後均安然無恙,証明其原始設計非常堅固可靠,因此臺大海洋所在2013年決心自行發展水面浮台觀測系統時即決定仍繼續採用ATLAS載台作為平台,但舊有電路部份則完全改為由所內電子技師自行設計、開發、製做的資料擷取、記錄與銥衛星傳輸系統所取代,如此除易於自行客製化增加或調整觀測項目外,並易於維修保養以及故障排除作業,可以提昇錨碇儀器設備觀測作業的妥善率。臺大海洋所新開發的系統具有幾項特點:(1)所有電路均有休眠模式,同時完全採用低耗電設計,使用幾顆鋰電池供電便可連續作業18個月以上,因此不需使用太陽能板供電,如此可減少一個容易造成系統故障的因素同時也可降低平台水上部份的風阻;(2)水上以及水下各感應器所量測到的即時資料均可透過衛星直接傳回所內的中控站,再傳給使用者應用;(3)水上以及水下剖面觀測資料之內存係存放在不同的獨立單元防水機殼內,藉以減少在極端惡劣天候下內存資料被毀的風險;(4)水下各感應器所量測到的即時溫、鹽剖面資料會經由感應方式傳給位於水面平台上的主控系統(以往水下剖面資料僅能內存,無法即時外傳),再由後者整合後透過衛星傳回所內中控站。
 |
 |
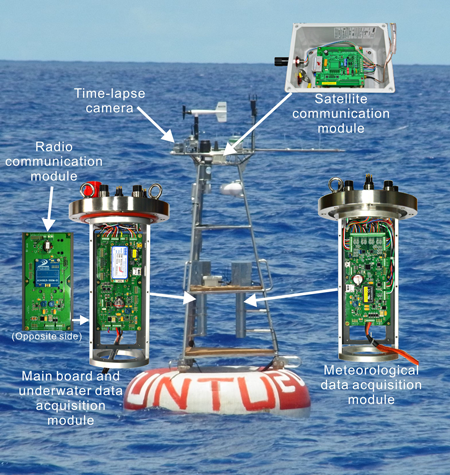
第一代系統(包括自行設計、製作耗電量極低的中控電路板、銥衛星資料傳送電路板、5500公尺長深海錨碇系統設計及海面以上與水下探針的率定與組裝等作業)於2015年初完成,隨後6月9日海研一號順利將浮標布放在墾丁東南東方250海浬處的深海(此處為西北太平洋歷史颱風經常經過的熱點),浮標隨即成功地將西太平洋區第一組結合海水0~500公尺不同深度的溫度、鹽度、水壓以及海面氣溫、氣壓、風速、風向、日照等之數據傳回,其後每30分鐘便將間隔6分鐘記錄一次的海、氣象資料穩定地回傳至海洋所中控站,期間經歷「蓮花」(Linfa)、「昌鴻」(Chanhom)、「蘇迪勒」(Soudelor)、 「天鵝」(Goni)等颱風浮標均能正常作業,証實此套極低耗電系統已成功通過惡劣海況下現場測試的考驗。第一代系統海上施測雖算成功但也發現一些需要改進的缺點,例如水面上有些感應器防水功能不足、衛星資料傳輸只有單向,欠缺由中控站發令機動調整觀測間距的功能等等。2015年秋末第一代系統回收後(上二圖為第一代系統回收作業照片,臺大海洋所楊穎堅教授提供),海洋所浮標團隊即著手改善,並於2016年春季推出第二代系統(系統水面部份之架構示意圖如下)。
 |
|

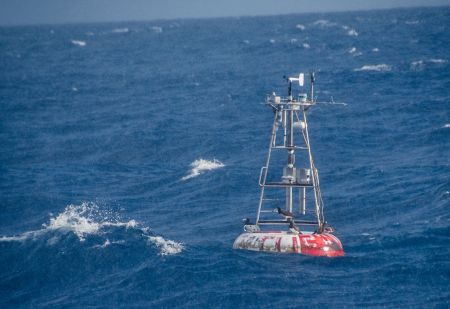
2016年6月26與27兩日,海研一號將臺大海洋所新設計的海氣象自動觀測浮標(第二代系統)共兩組分別施放在臺灣東方約175公里以及東南方約375公里的海域(二站分別稱為NTU2與NTU1,如上右圖;作業照則如下左與右二圖),藉以觀測氣象與海象變化;自動觀測浮標正常設定為水面上及水下觀測資料每半小時透過銥衛星通訊會回傳一次,每組浮標的觀測項目包括有溫濕度計、旋葉式風速風向計、超音波風速風向計、氣壓計、雨量計、短波日照儀、淨輻射儀、表水溫度計、兩組海流儀(深度分別為25m以及75m)、五組溫鹽深儀(深度分別為5m,25m,50m,75m,100m)、六組溫壓儀(兩組由氣象局提供)以及五組未具資料即時傳輸功能的溫壓儀(深度分別為125m,150m,200m,250m,300m,500m,700m,900m,1400m,1900m,3000m)。浮標的中控系統並新增無線電與衛星遙控功能,可依任務需求調整取樣密度與傳輸頻率。 另外,浮標上也安裝了一部縮時攝影機,可以拍攝不同風速下的海上浪況。水下部分則捨棄了原有的ICC通訊介面,改以自行設計的設備,減少被破壞的風險,每個探針下方也加裝了自行設計的割線裝置(cutter),可減低釣線糾纏儀器之影響。
 |
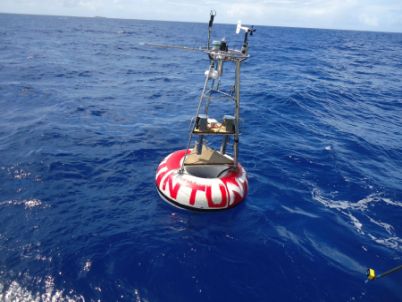 (臺大海洋所浮標系統作業照片均為臺大海洋所楊穎堅教授提供) |
 浮台成為海鳥棲息所,有時鳥糞會對氣象儀器造成干擾,因此有些感測器附近就需要加裝防鳥踏裝置。 |
 施放後四個月浮台下方即長滿許多海洋生物,並吸引魚類聚集覓食。 |
2016年觀測期間亦有四個颱風通過或經過NTU觀測浮標,分別是編號201601的「尼伯特」(Nepartak)、編號201614的「莫蘭蒂」( Meranti)、編號201616的「馬勒卡」(Malakas)以及編號201617的「梅姬」(Megi)颱風,浮標系統在這些颱風期間所觀測到的資料請點選臺大海洋所「海氣象即時傳輸浮標」網頁觀看。這些颱風中最令人意想不到的是「尼伯特」,它是2016年太平洋區海域生成的第一個颱風,也是當年最強烈的一個颱風,「尼伯特」生成後不久即朝臺灣筆直而來(如下圖),在接近臺灣時颱風中心好死不死就幾乎沿著NTU1與NTU2兩個浮標的連線通過,這一來立即在一些Typhoon watcher社群裡造成轟動,由於颱風中心好像商量好似地連掃兩個觀測浮標,這種機率幾乎是零的事情然而現實卻是真正發生了,這種巧合是任誰事先也想不到的,而NTU浮標至此就一炮而紅並獲許多媒體報導(請點選媒體報導觀看)。
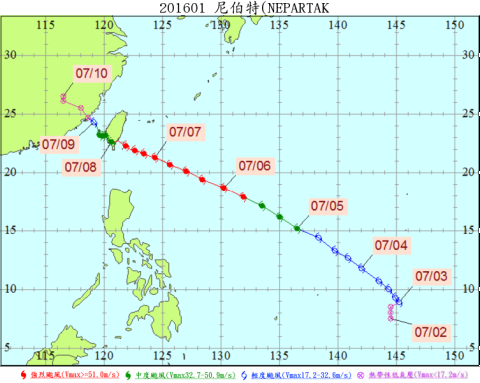 |
「尼伯特」(Nepartak)颱風路徑圖。
|
(四)小結:
看完本章前面各節後,讀者說不定會有這麼個印象:「這物理海洋學用到的儀器裝備還真是五花八門」;可不是嗎?其實還有好多好多做小尺度現象研究用的東東我還沒介紹呢。實驗物理海洋學研究人員做的主要就是系統整合、布置實驗以及後續的資料分析與解釋,我們在這一章裡談到的主要都是研究大尺度或中尺度現象所用到的裝備,這些裝備的量測原理以及所用到的電子元件絕大多數並非海洋界原創,但由於「需求為發明之母」,因而便產生了源源不絕的使用創意,以及形形色色的不同觀測儀器。當代的物理海洋觀測早已超越以研究船花費大量人力一站一站慢慢累積海洋資料的時代,如今的海洋觀測是結合了研究船、人造衛星、錨碇陣列、剖面浮標、以及自走式載具等多點開花所共同結合構成的4D(空間+時間)觀測網,「如何能夠更精確、更有效率地同化觀測資料以求能夠對海洋環境場變化行為做出更精準的預報」這是物理海洋學在應用層面上一直努力追求實現的目標。

 |
 |
本章始建於1998/9/17, revised: 2017/4/11